Emberarcú technológia

![]()
Precíz FAULHABER hajtások humanoid robotokhoz
Járnak, megragadnak, egyensúlyoznak – és emberhez hasonló megjelenésükkel lenyűgöznek: A humanoid robotok figyelemreméltó mozgékonysággal rendelkeznek, és még az arckifejezés értelmezésére vagy a nyelv megértésére is képesek. Ami néhány évvel ezelőtt még futurisztikus elképzelés volt, napjainkra konkrét formát ölt. A humanoid robotok technológiai fejlesztései mögött a mesterséges intelligencia, a precíziós mechanika és a nagy teljesítményű hajtástechnológia összetett kölcsönhatása rejtőzik. Döntő szerepet játszik a miniatürizálás, mivel a magas fokú funkcionalitás mellett kompakt kialakítást tesz lehetővé. A FAULHABER szakértelme és a modern technológiák alkalmazása kijelöli az irányt a robotika fejlődésének következő szakaszához.
Két lábon járni összetett feladatot jelent, amelyet pontosan kell irányítani. Még az embereknek is egy bő évre van szükségük ahhoz, hogy elsajátítsák ezt a látszólag triviális mozdulatsort, és összehangolják a körülbelül 200 izom, számos bonyolult ízület és az agy különböző speciális régióinak az együttműködését. A humanoid robotok kedvezőtlen emelőkar-áttételei miatt egy minimális méretű motornak a lehető legnagyobb nyomatékot kell szolgáltatnia ahhoz, hogy képes legyen reprodukálni az emberihez hasonló mozgást. Míg a klasszikus robotokat jellemzően erősen strukturált környezetben, például az ipari gyártásban vagy a logisztikában használják, a humanoid robotok teljesen új terepre lépnek: a mindennapi életbe. Olyan strukturálatlan környezetben kell eligazodniuk, ahol például minden nappali eltérő, és minden feladat egyedi. Amikor közvetlen kapcsolatba lépnek az emberekkel, kevésbé absztrakt a működésük, inkább fizikailag vannak jelen – gyakran az ember közvetlen közelében.
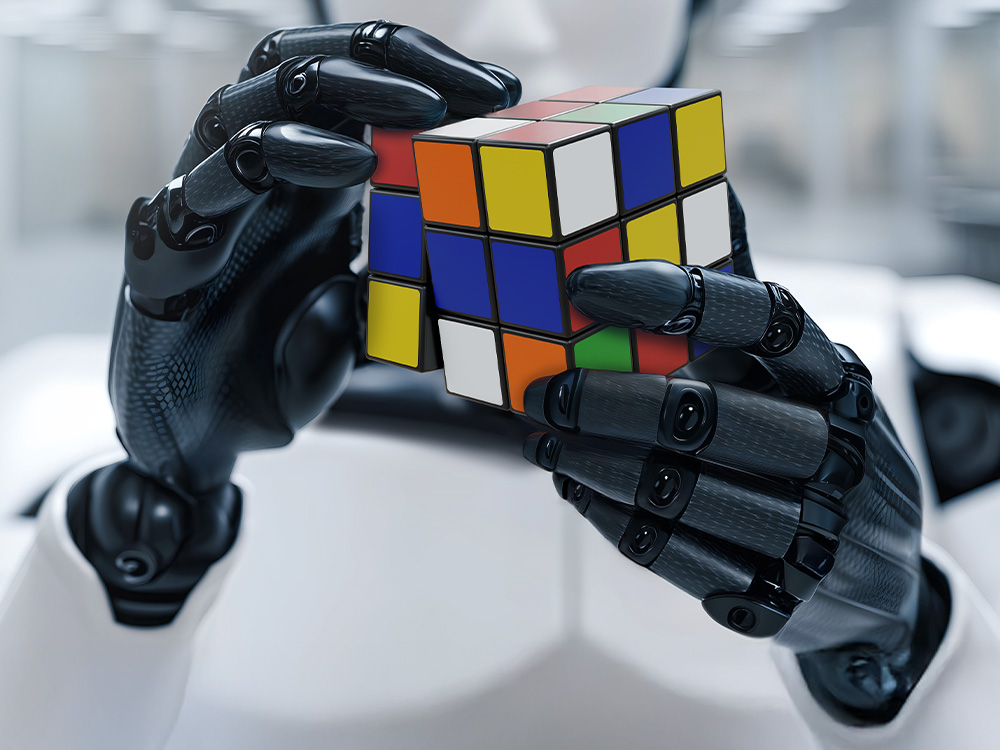
A humanoid robotok képezik a kapcsolódási felületet a mesterséges intelligencia és a valós, fizikai világ között. Nemcsak digitális információkat képesek feldolgozni, hanem konkrét cselekvésekké is átalakítják ezeket. Ha a mozdulatsorok zökkenőmentesen és biztonságosan működnek, a humanoid robotok számos olyan feladatot végezhetnek el, amelyeket korábban az emberek számára voltak fenntartva – legyen szó veszélyes környezetről, az emberekkel való közvetlen kapcsolatról vagy ismétlődő folyamatokról. Háztartási teendőket látnak el, támogatják a rehabilitációt, idős emberekkel foglalkoznak, vagy a kiskereskedelemben használják őket. Erősségük a sokoldalúságukban és az emberi környezethez való alkalmazkodóképességükben nyilvánul meg.
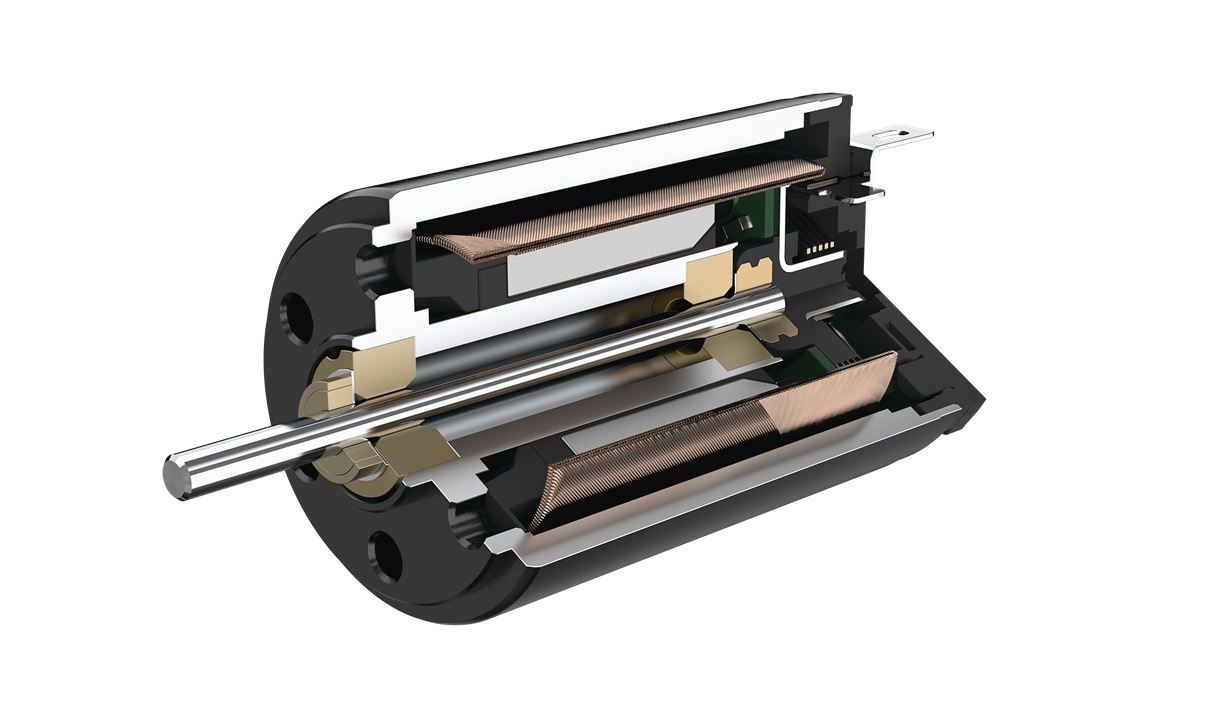
A hajtásrendszerek szerepe
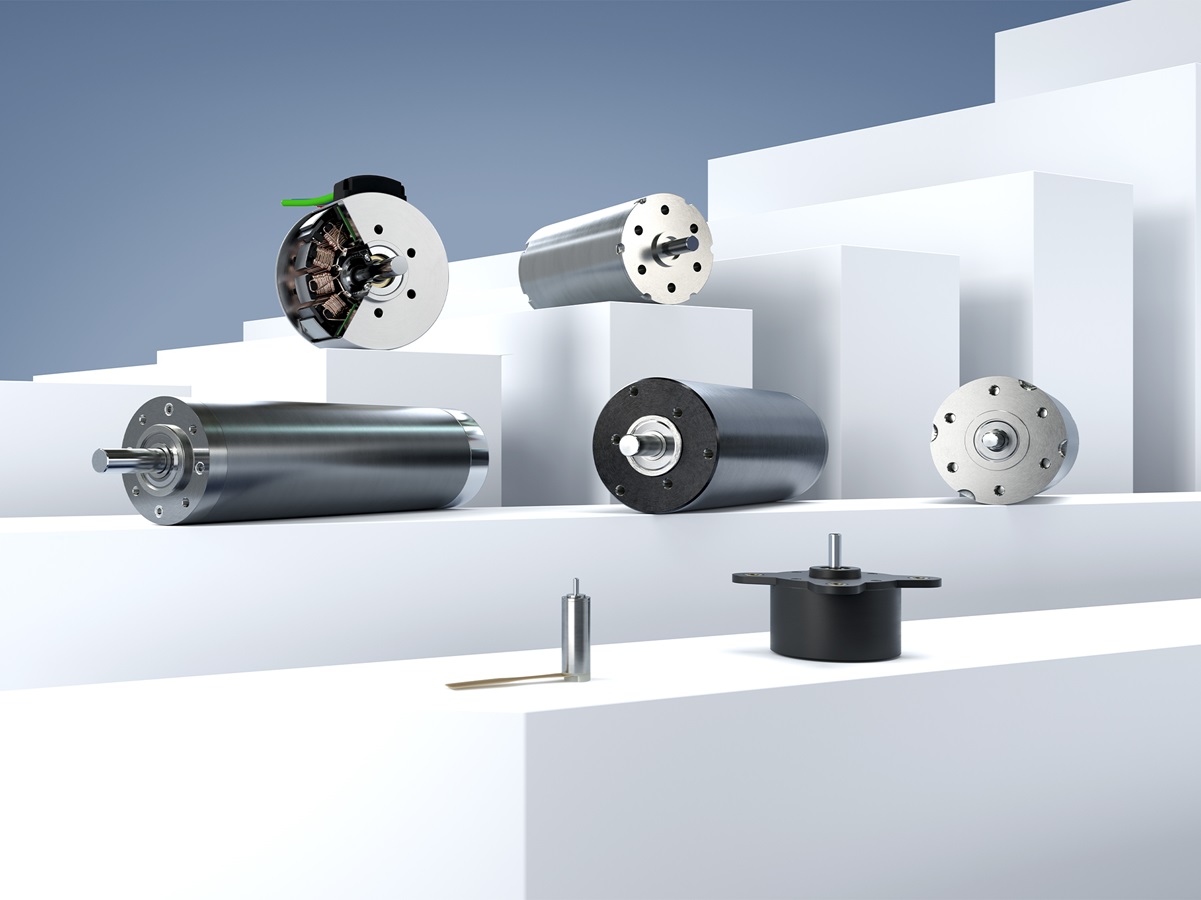
A humanoid robot által végrehajtott minden egyes mozgás középpontjában egy precíz hajtásrendszer áll. Ez dönti el, hogy milyen simán emelkedik egy kar, milyen gyorsan reagál egy láb, vagy milyen finoman fog egy ujj. Ezért a hajtástechnológia jelentős hatással bír a humanoid mozgások teljesítményére, természetességére és biztonságára. A miniatürizálás, az energiahatékonyság, a dinamika és a pontosság itt alapvető követelmények – ezek összhangja kizárólag magasan fejlett mikromotorokkal érhető el. Ezek egytől-egyik olyan szempontok, amelyek nemcsak a robotikában, hanem a protézisek esetében is meghatározóak. A humanoid robotok és a protézisek között zökkenőmentes az átmenet. A modern protézisek – különösen a kar- és kézprotézisek – az emberi test mozgását reprodukálják, és ezt a humanoid robotokéhoz hasonló elvek felhasználásával érik el. Az elektromotorok, az érzékelők és a pontos vezérlés intuitív és erőteljes mozgást tesznek lehetővé. Mindkét esetben a technológia és a biológia tökéletes szimbiózisa a meghatározó – legyen szó akár az emberi képességek bővítéséről, vagy az elveszett funkciók pótlásáról.
FAULHABER a humanoid rendszerek jövőjéért
A mikromotorok nemcsak a humanoid robotokban használatosak, hanem régóta alkalmazzák őket robotizált segédeszközökben, például motorizált kéz- és lábprotézisekben is. Bebizonyosodott, hogy megfelelnek a legmagasabb követelményeknek a különösen érzékeny és kihívást jelentő alkalmazásokban is. A FAULHABER nagy pontosságú hajtásrendszereket fejleszt és gyárt, amelyeket világszerte modern protézisekbe és humanoid robotokba egyaránt beépítenek. Legyen szó finom ujjmozdulatokról vagy erőteljes léptető mozgásokról – a motorok a legkisebb helyeken is maximális mobilitást tesznek lehetővé. Ez különösen előnyös az olyan dinamikus mozgásoknál, amelyek elengedhetetlenek az emberi gesztusok utánzásához. És mivel ezek a rendszerek egyre gyakrabban érintkeznek közvetlenül az emberekkel, a biztonsági szempontok és a kiváló irányíthatóság kulcsszerepet játszanak. Az ember és a gép közötti zökkenőmentes és – mindenekelőtt – biztonságos együttműködés eléréséhez alapvető fontosságú a megfelelő koncepciók kidolgozása. Ez nem csak a szoftveres vezérlés kérdése – magába a hajtásmegoldásba is integrálni kell a védelmi mechanizmusokat. A FAULHABER olyan hajtásmegoldásokkal felel meg erre az igényre, amelyek egyszerre nagy teljesítményűek és kompaktak, valamint biztonságosra lettek tervezve, azaz ideálisak a robotika és az orvostechnika kihívást jelentő feladataihoz. Ezáltal a gyakorlatban is lehetővé válik a rövid ideig tartó, szélsőséges terhelés, anélkül, hogy az befolyásolná az alkatrészek élettartamát. Szoros együttműködésünk a vezető kutatóintézetekkel és fejlesztési partnerekkel biztosítja, hogy a FAULHABER technológiája mindig az élvonalban maradjon.
Ismerje meg a precíz FAULHABER hajtások humanoid robotokhoz